QuantumDB API for Database Security and Integrity Enhancements
Dr. O. Osemwengie leads the research and development team. The research projects posted on this page are active and his current research submitted to the US Army is titled “QuantumDB API for Database Security and Integrity Enhancements” Here is the abstract for the research: “QuantumDB is a database system required for implementation of secured database management system by the Army and Department of Defense within non-clustered environment in tactical space where computing and storage resources are limited. This research aim at feasibility of providing cell-level data security in a non-distributed way while ensuring pedigree and provenance attribution. The API and its in-memory processing engine, which converts data to quantum state is designed to connect with already existing database while ensuring that security of data up to the cell level is achieved”.
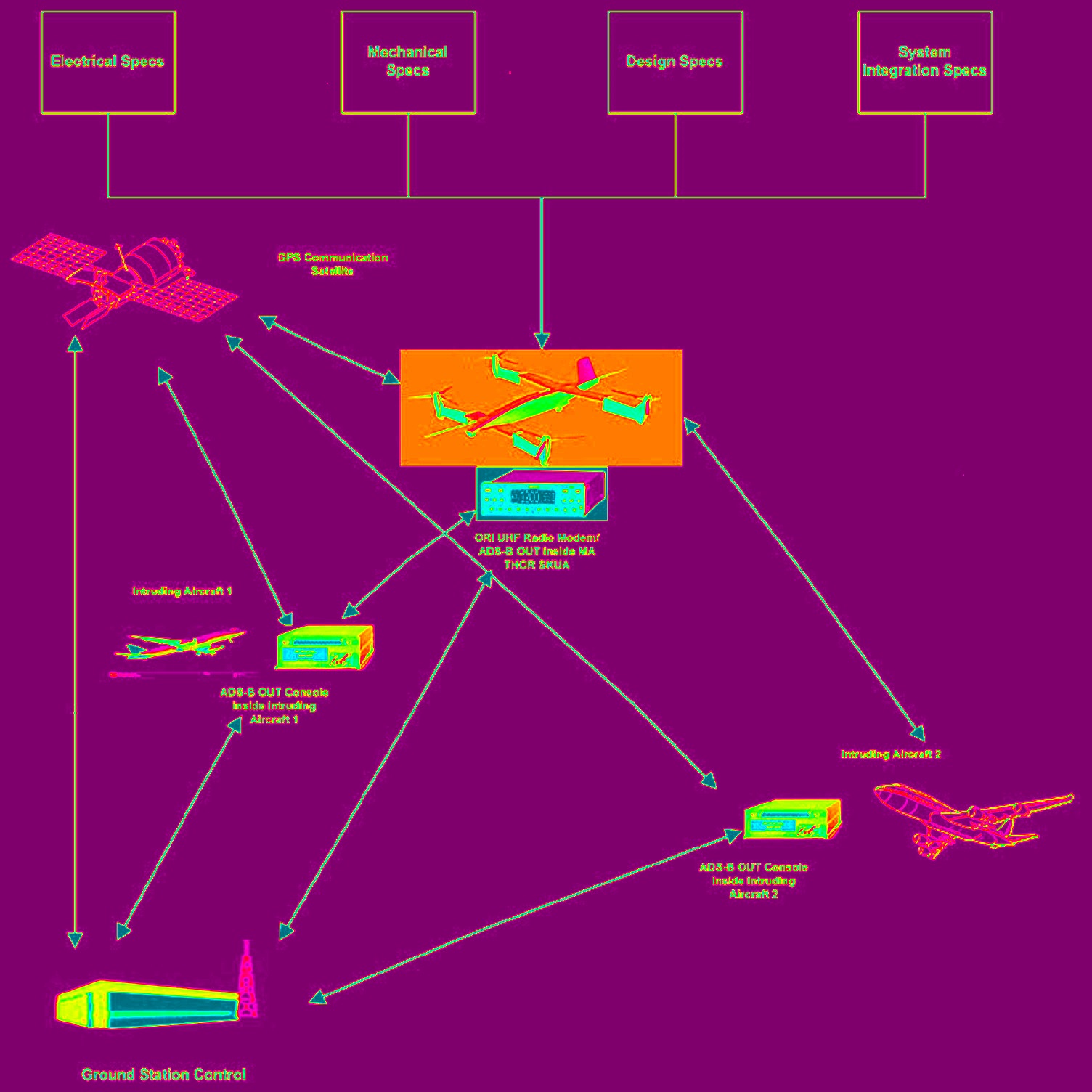
UI CA LIDAR UAV Collision Aviodance System
The value of the UI CA LIDAR systems research is that unmanned aircraft can ‘file and fly’ like manned aircraft. The research will enable Ubiquity Interface to develop a low cost more advanced UAV collision avoidance systems for commercial use of drones flying at or below 18,000 ft. Customers will be UAV manufacturing industries and tens of thousands UAV owners globally that will apply UAVs in a handful of industries: agriculture, energy, utilities, mining, construction, real estate, news media, and film production.
The development of UI CA LIDAR for UAV collision avoidance systems will focus on the use lasers technology that have the main advantage to provide important peak powers while functioning with important repetition rates. That is typically the interesting compromise since measurement frequency has become an essential parameter in telemetry for optronic integrators: With a minimum restitution frequency of 20 Hz, the UI CA LIDAR will be the only commercial application solution to follow efficiently long distance moving targets.
D1 Hauler Cargo UAV
Ubiquity Interface collaborated with Marques Aviation in developing a military cargo UAV, the Hauler V.1 for a DARPA sponsored solicitation. The aim of the proposed research program is to develop a versatile drone for cargo delivery and casualty evacuation (CASEVAC) in support of military operations. The development of cargo drones has been stagnant due primarily to safety concerns in the operation of UAVs and integration in the air space. The US Air Force and the FAA are in support of medium size drones for military operations and cargo delivery, as long as UAV operations attain acceptable levels of safety. We propose R&D of a wing-copter drone configuration with VTOL/STOL capability known as D1 Hauler characterized by innovative vertical propulsion technology. The new technology requires further development of our proprietary patented vertical coaxial-rotor propulsion model (Patent: US2013/0105620 A1) to produce an advanced wingcopter concept characterised by: dual turbo-shaft engines for redundancy, coaxial puller propeller, coaxial vertical rotor system, variable pitch vertical rotors, retractable vertical rotors to reduce drag, asymmetric vertical rotor diameter to isolate vibration and resonance, superior aircraft structural design to dissipate vibration originating from 10 propellers, reduced vehicle moment of inertia for enhanced flight control, and short vertical-horizontal flight transition

T V1 Quad Copter
Quad Copter
Aerial surveillance is frequently required of narrow areas between buildings, dense forests affected by prevailing high winds, and critical infrastructure with difficult and dangerous access. Current quad copters in the market have several shortcomings in performance and flight control that limit their applicability in demanding environments. There is, therefore, a need to implement innovations in the flight mechanics and flight control of current quad copters to ensure effective and safe monitoring of special sites of interest. Our proposed quad copter will be equipped with our technological device to allow the craft to fly horizontally in all directions without the need to tilt the quad copter. Such novel horizontal flight without tilting allows much higher aerodynamic performance from the four rotors to create lift, and more effective surveillance by keeping the video and infra-red cameras on the craft level, therefore improving aerial imagery.
